¶ GPS使用指南
¶ 硬件准备
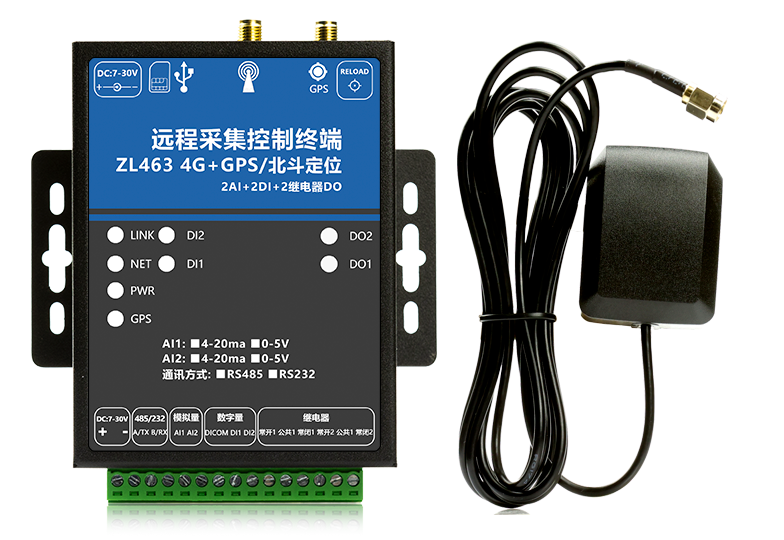
- DTU 网关(ZL462/ZL463 GPS/北斗定位模块)
- USB 数据线
- 天线
¶ 软件准备
注意不要将软件安装到C盘,容易出现问题;
上位机软件包括SD-RTU配置工具DevelopLink SDRTU软件:点我下载
¶ gps配置
接下来将对接口、网络连接、虚拟设备、ModBus依次进行配置。
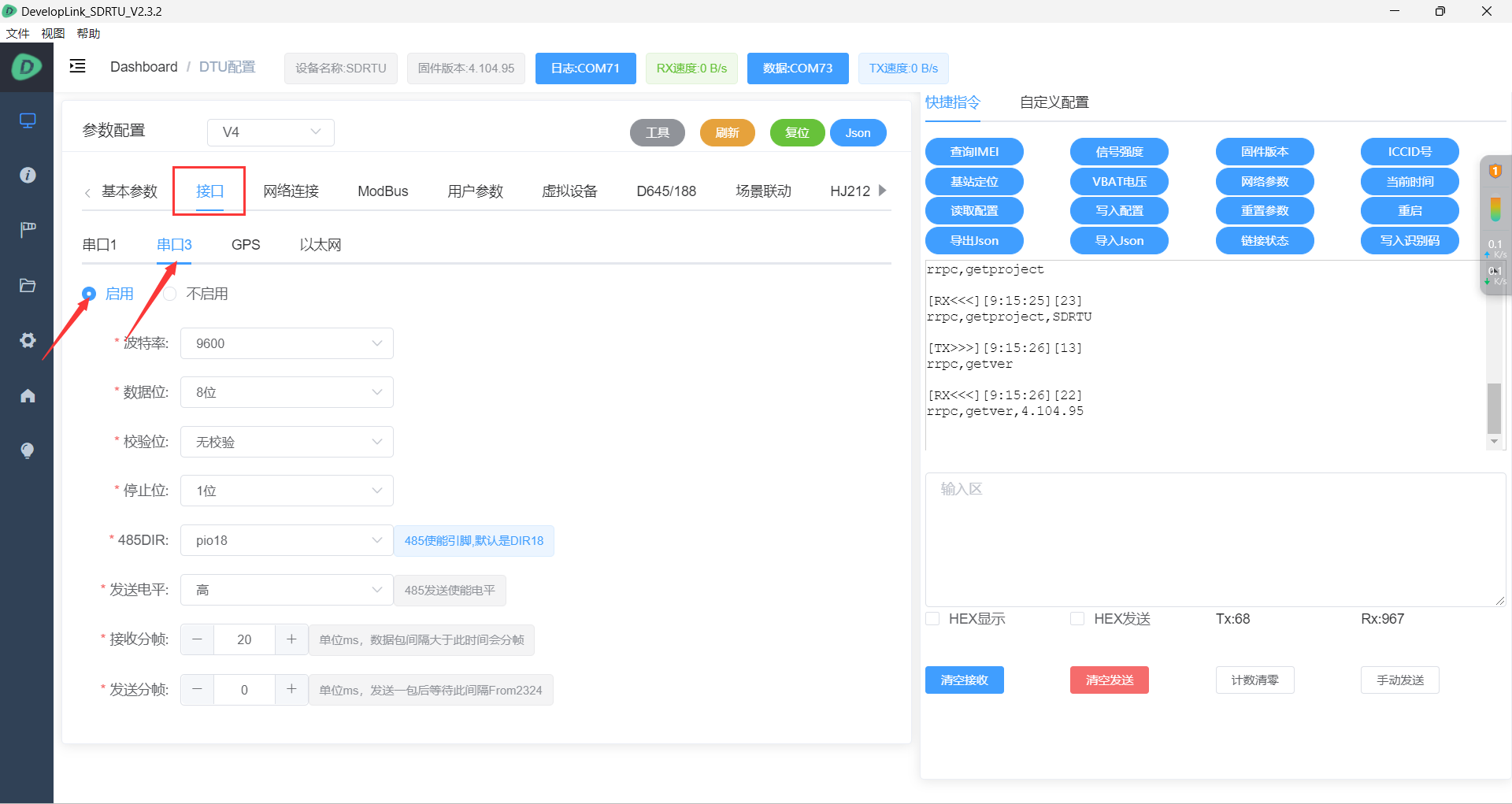
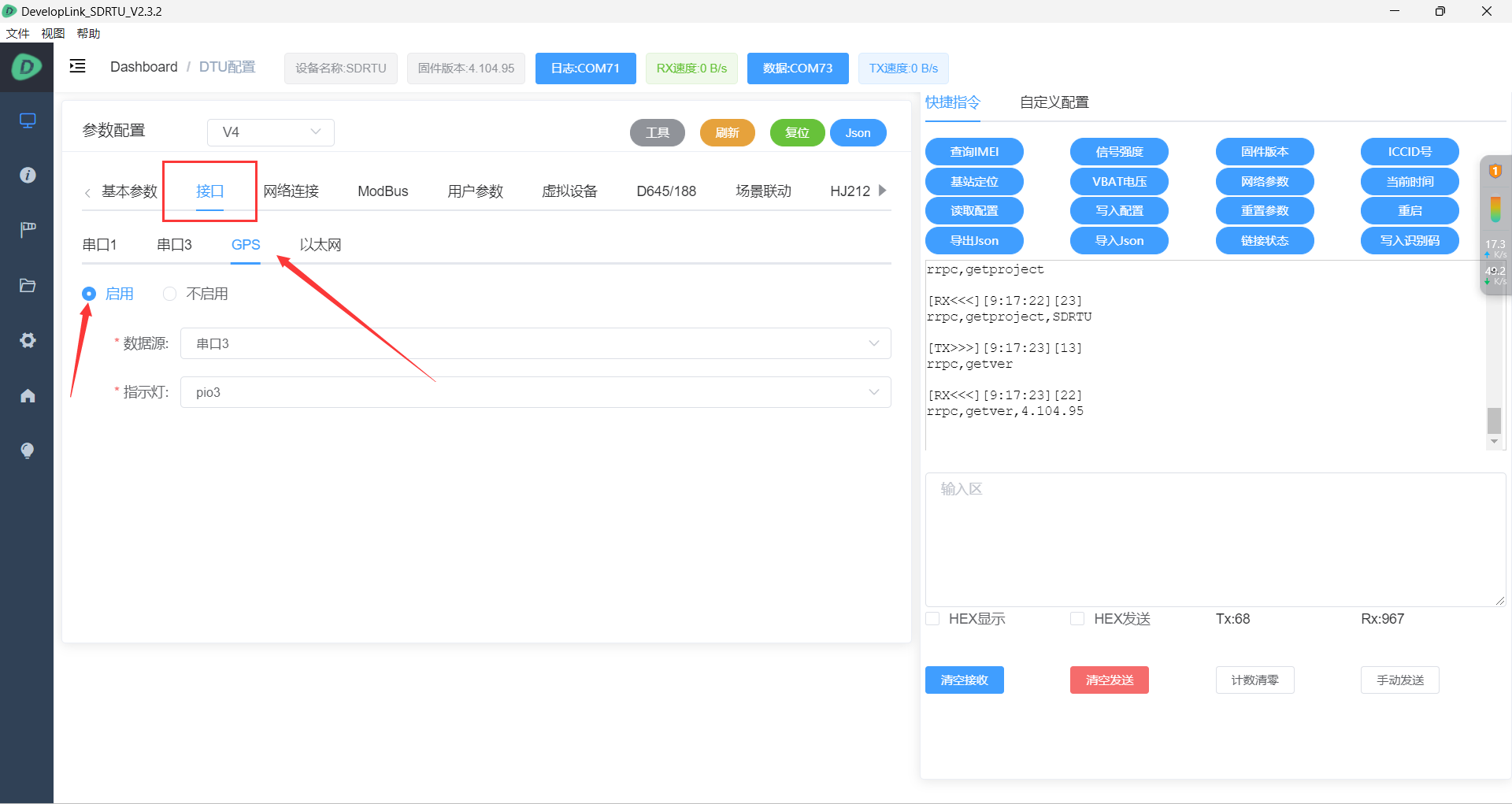
1、接口配置
这里只需要配置两步,第一步打开串口3,第二步打开GPS。
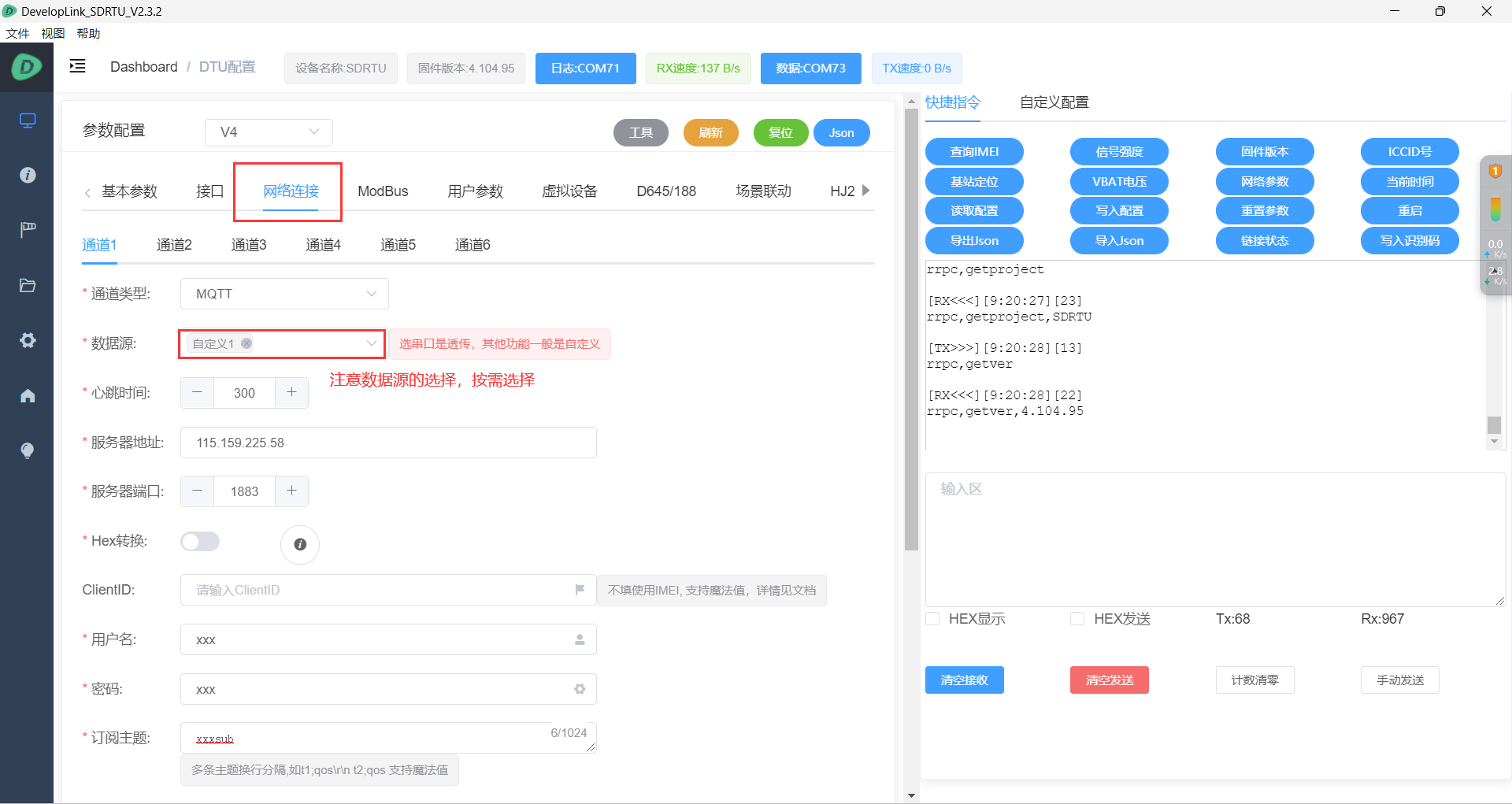
2、网络连接配置
此配置中以MQTT为例,注意数据源的选择,用户按需选择,这里的自定义1是指ModBus的输出数据源。
3、虚拟设备配置
注意输入配置模板、输入数据源的选择。LNG、LAT、ALT、SPD分别是经度、纬度、海拔高度和速度。

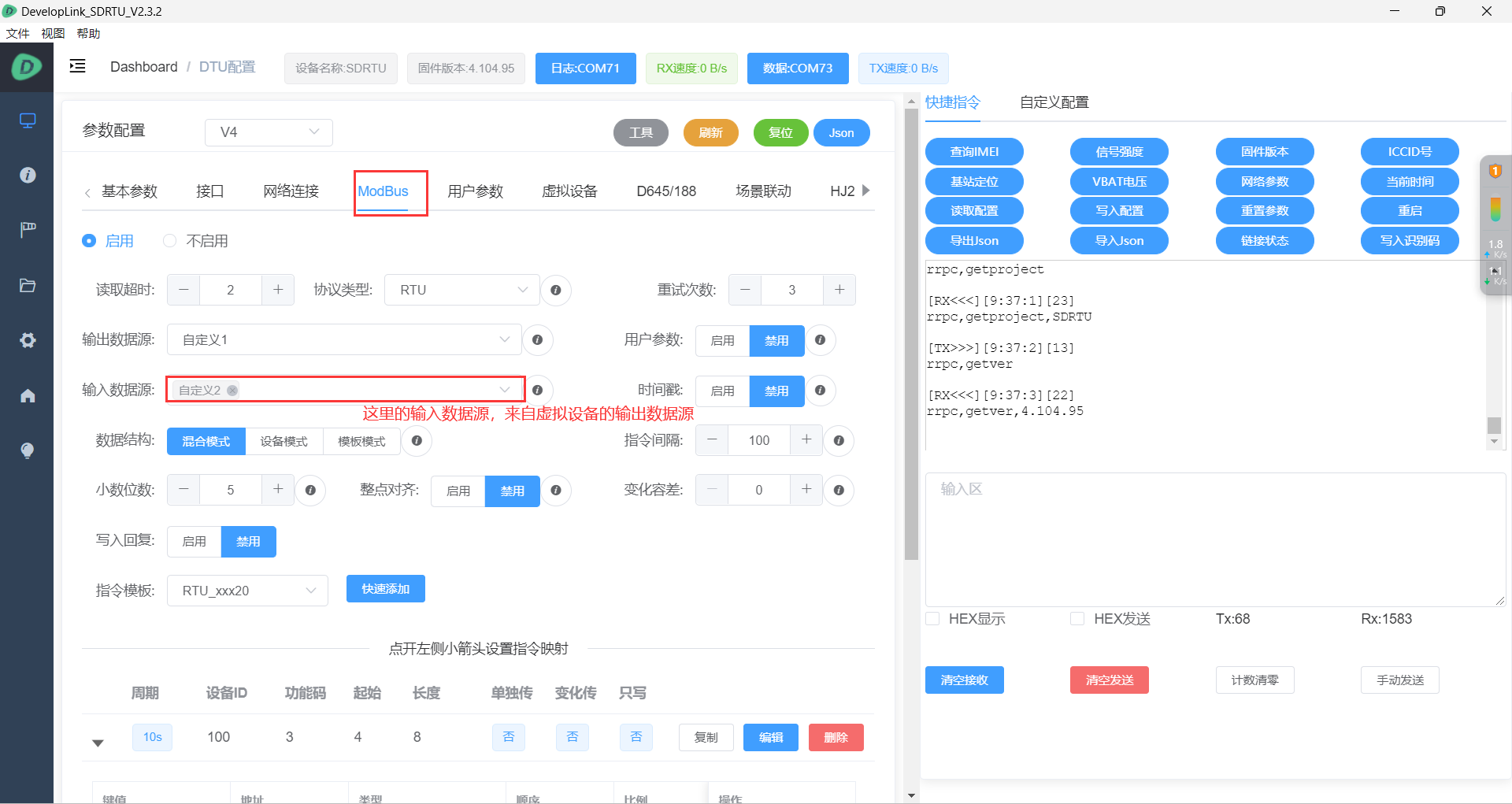
4、ModBus配置
注意输入数据源的选择
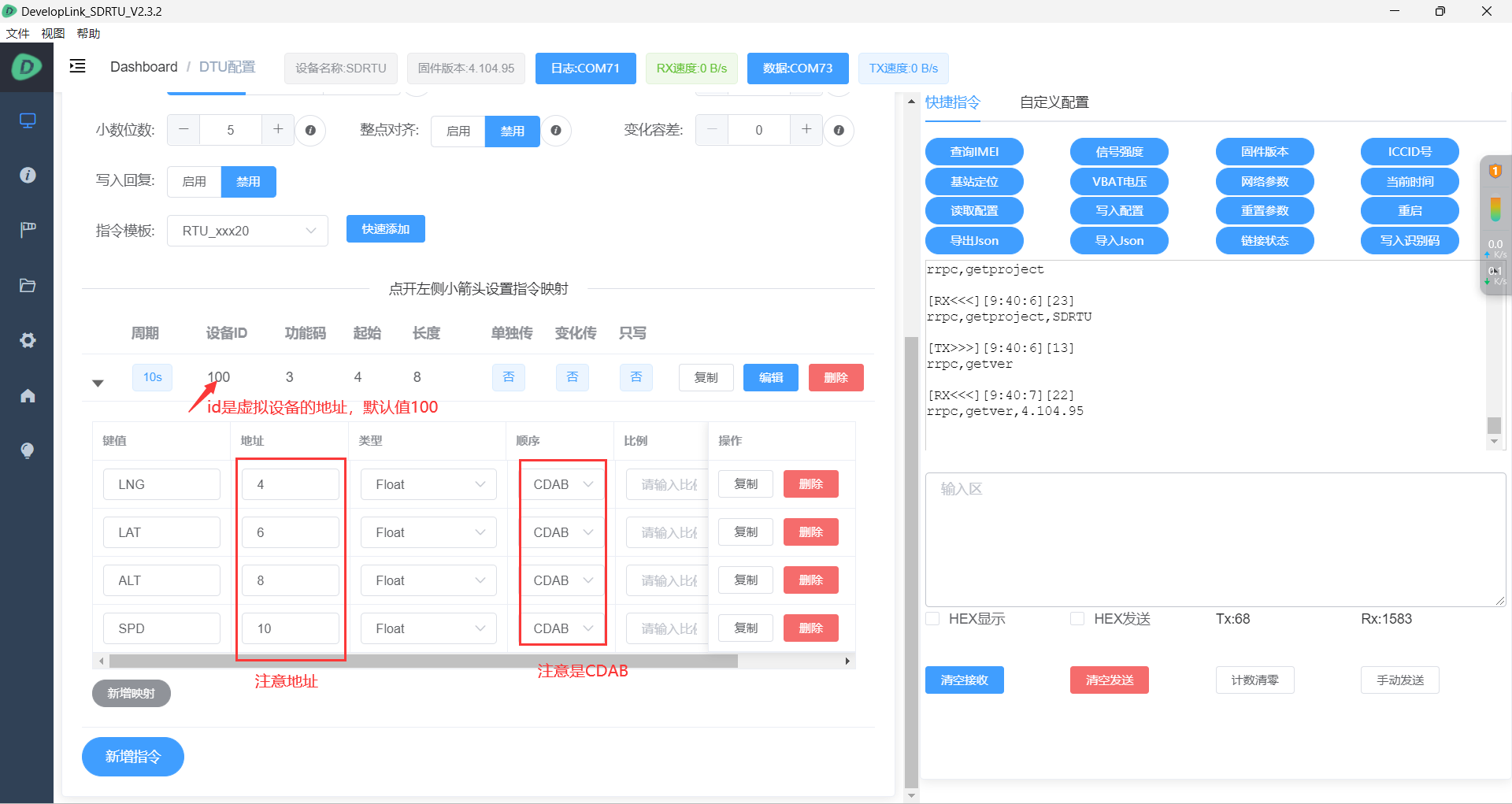
¶ 方法一(手动配置):
LNG地址4 类型float, LAT地址6 类型float,ALT海拔地址8 类型float,SPD速度地址10 类型float, 字节顺序为CDAB
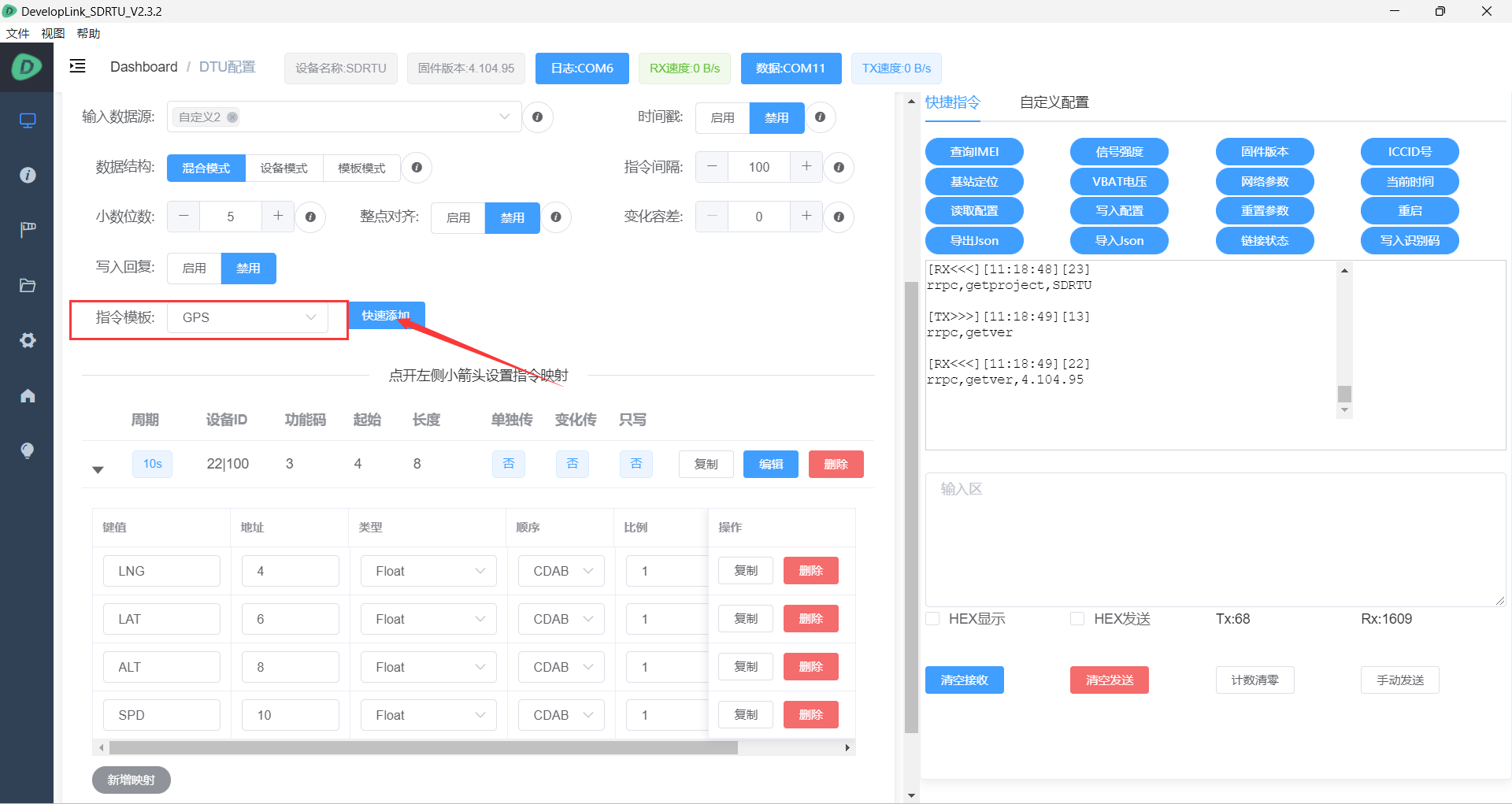
¶ 方法二(自动配置):
指令模板选择GPS,再点击快速添加,此方法更为快捷。
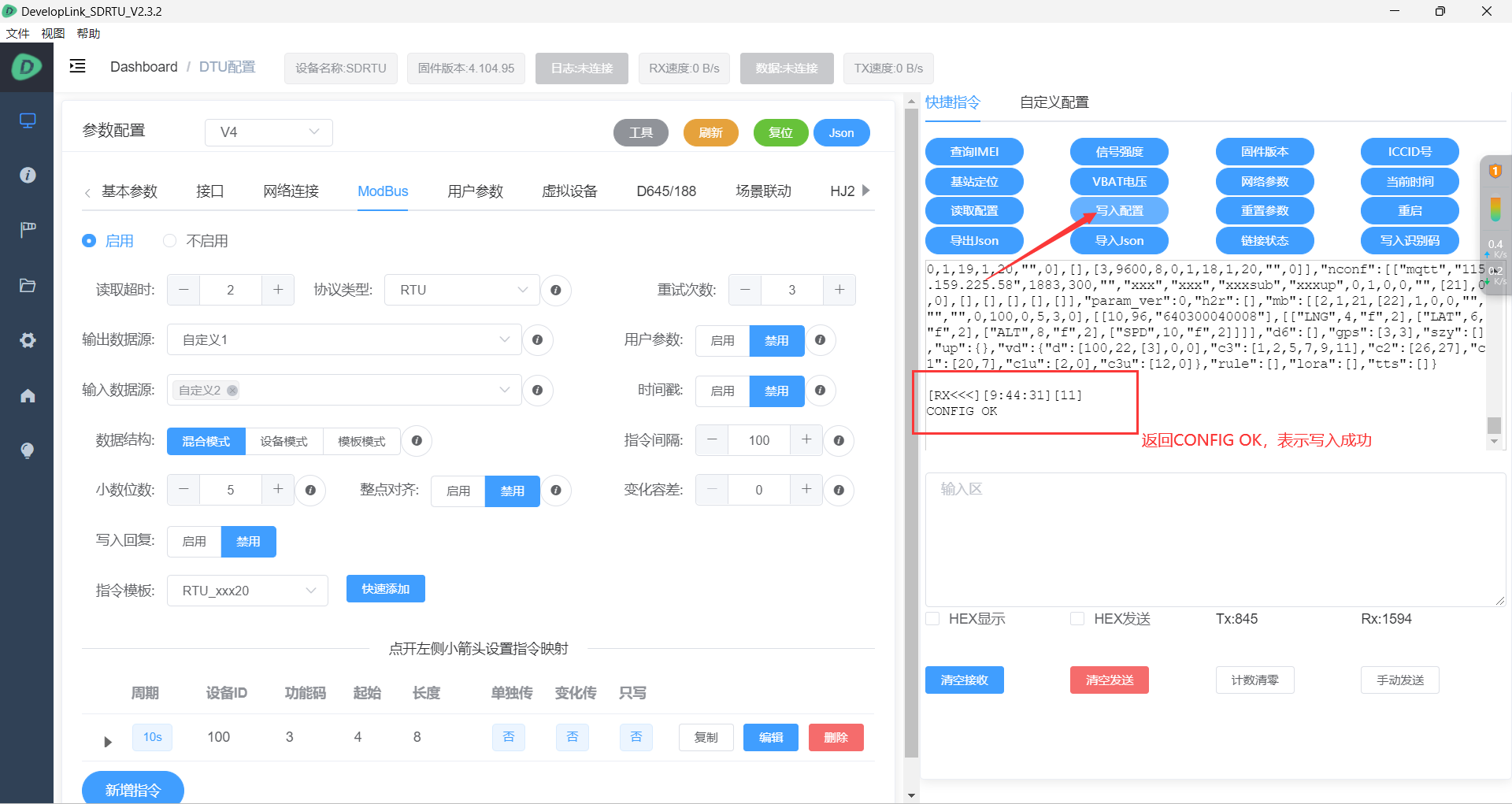
5、写入配置
以上配置完成后,点击写入配置,返回CONFIG OK表示写入成功。
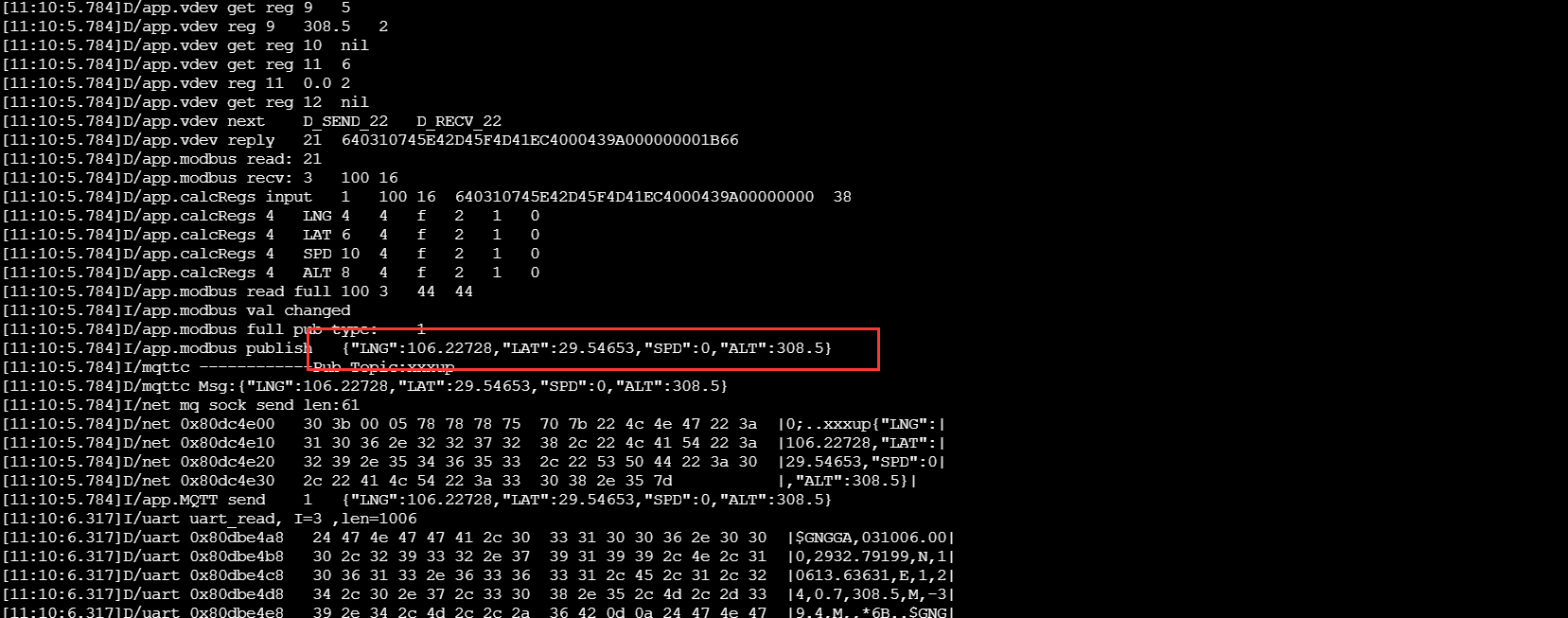
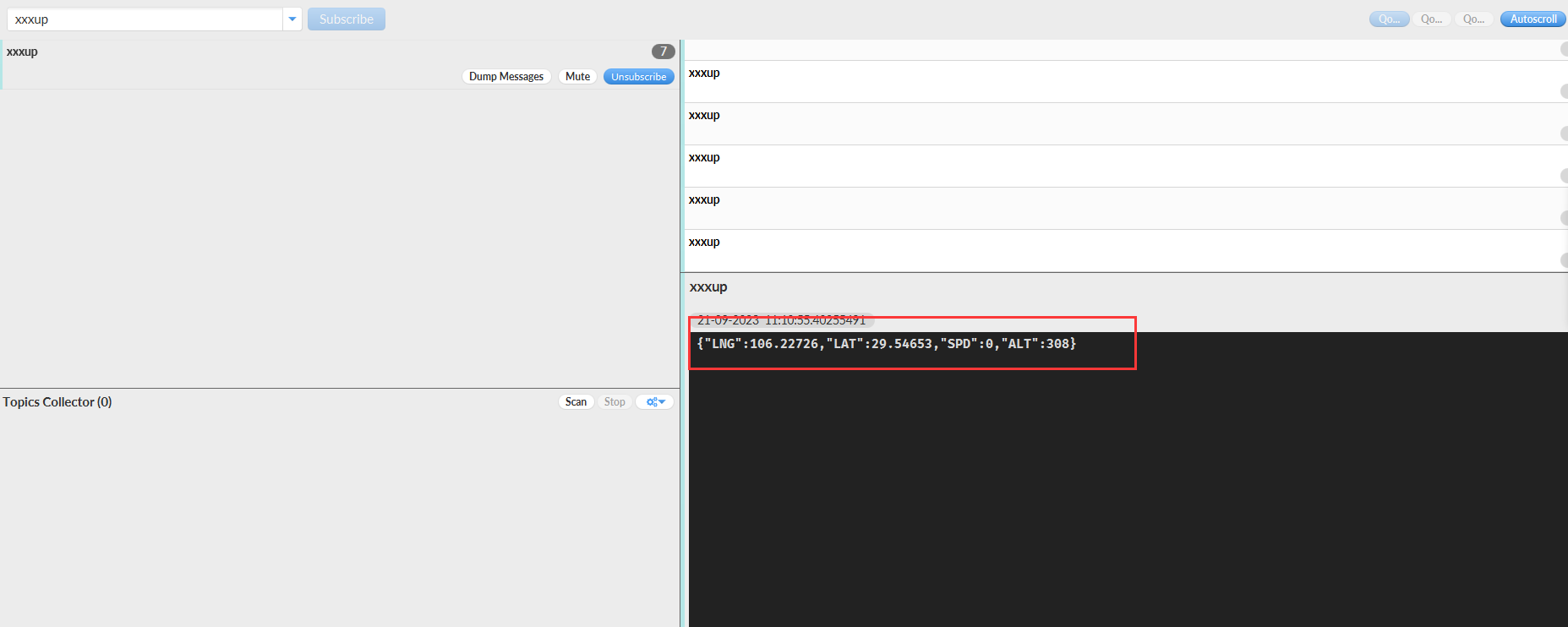
查看日志
¶ 方法三(用户参数):
适用于使用modbus读取传感器的情况下,可以使用用户参数把gps定位附加到采集结果上
- 配置好GPS后不需要启用虚拟设备
- Modbus或者645启用用户参数
- 在用户参数里面添加属性,名称可以自定义,值填写以下支持的值
| 属性 | 说明 | 必填 |
|---|---|---|
| 用户参数 | 在结果里面携带用户参数,用户参数支持魔法值,用户参数名称自己填写,值写这些可以自动替换: ${ts}时间戳,${date}格式时间字符串, ${imei},${iccid},${csq}动态信号,${vbat}动态电源电压,${lon}动态经度(有GPS用gps没有就是基站位置),${lat}动态纬度,${spd}动态速度,${fix}是否定位,${alt}动态GPS海拔(From V42),${geo}动态阿里云GPS信息结构体(From V42),${ip}动态IP |
否 |
¶ 物模型配置
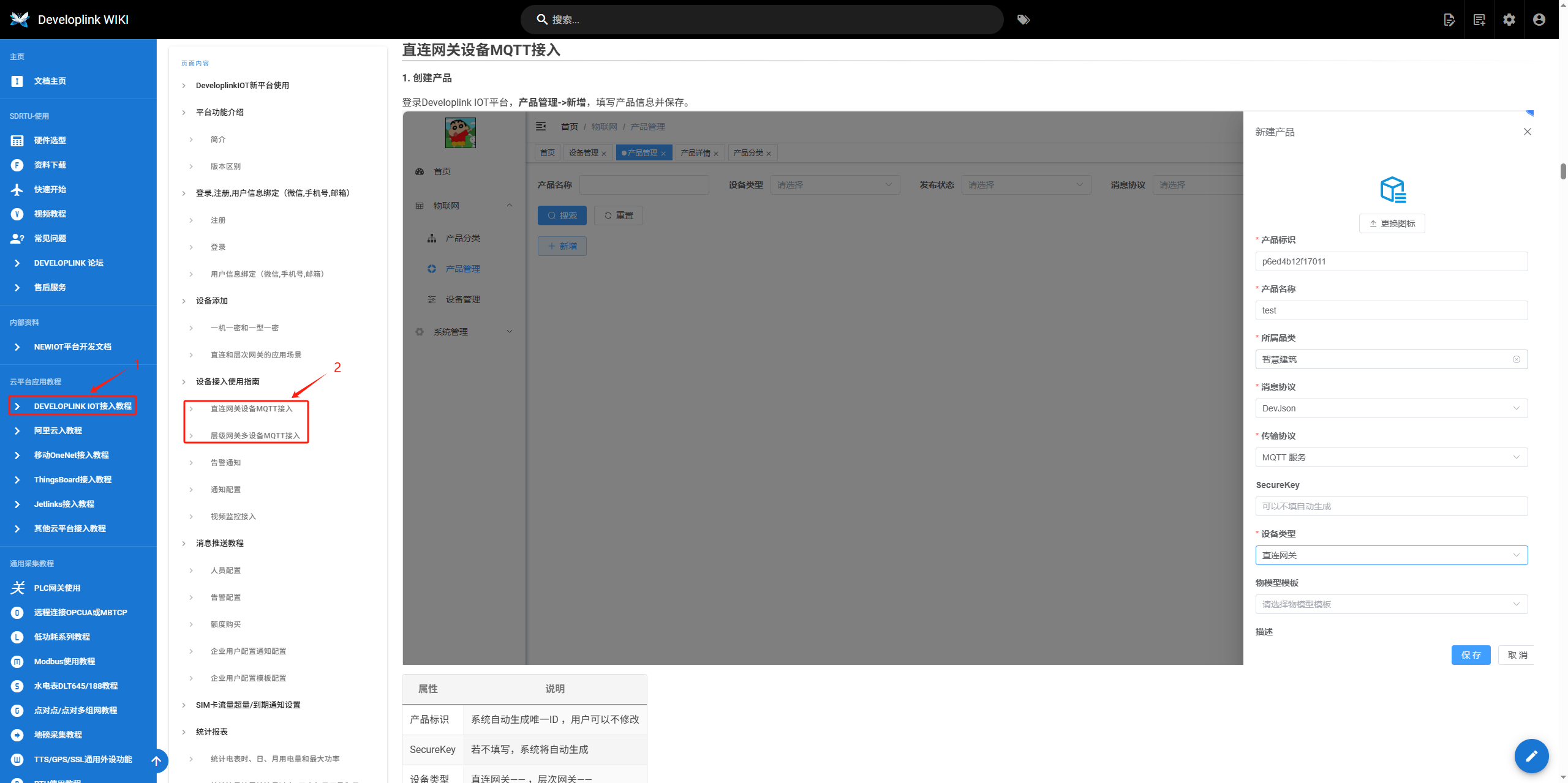
以DEVELOPLINK IOT接入教程为例,进入物模型创建页面
创建上一步指令映射键值对应的物模型属性:LAT、LON、ALT、SPD
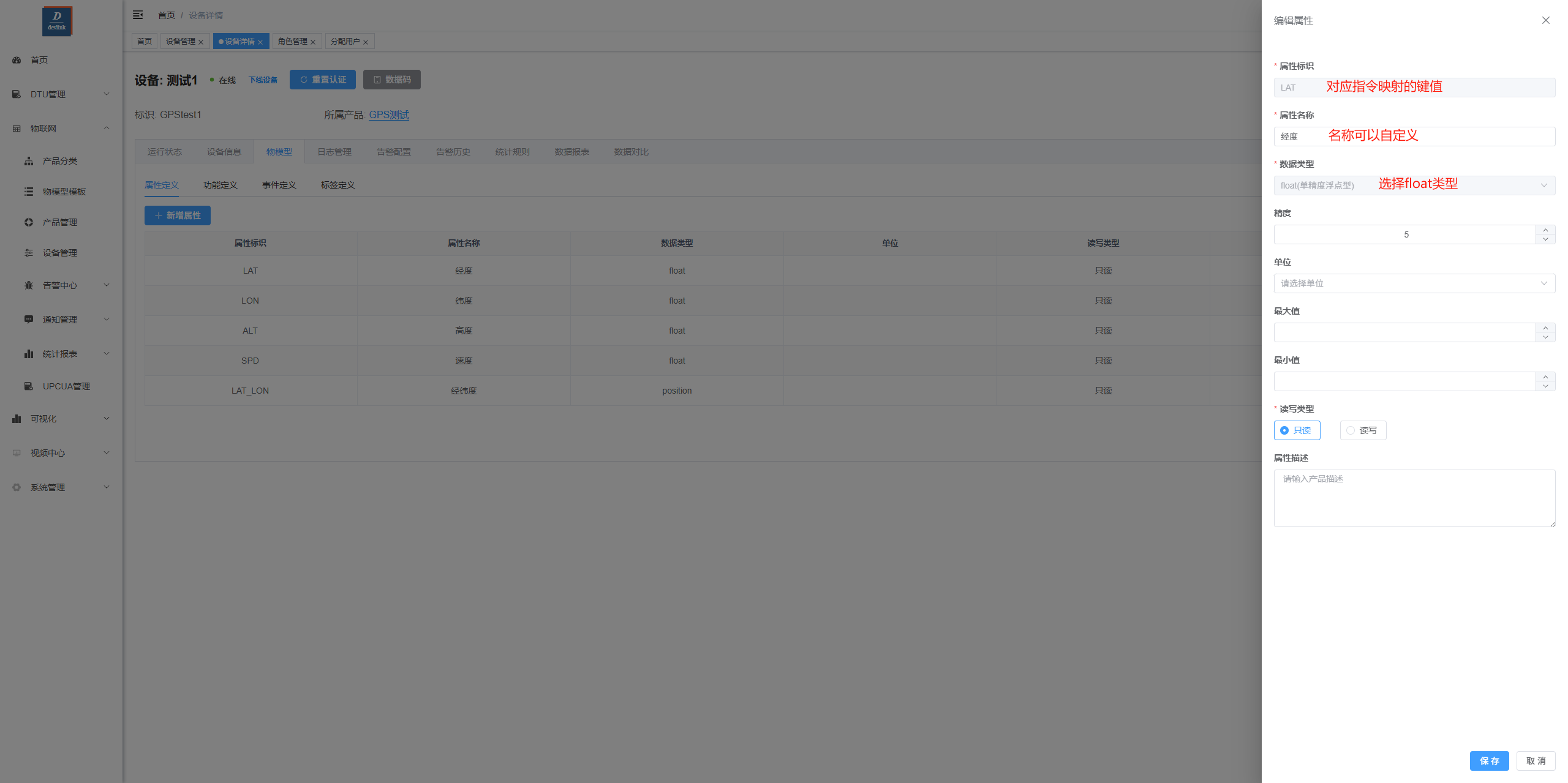
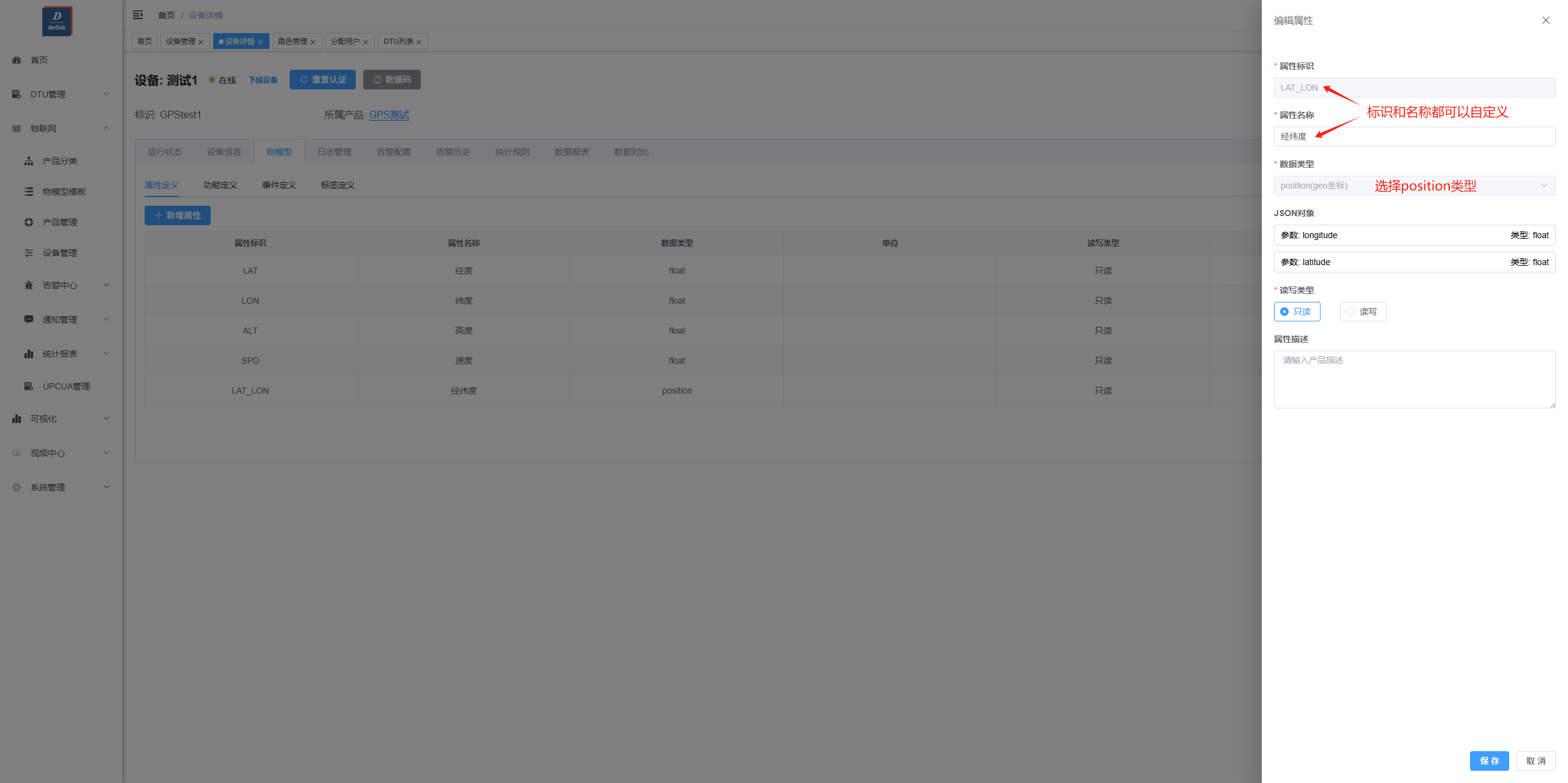
为方便坐标数据查看,可创建position类型的物模型属性,该属性标识无需在指令映射中创建!
创建position类型的属性后,还需要配置模板模式,模板模式详情请参阅modbus功能说明
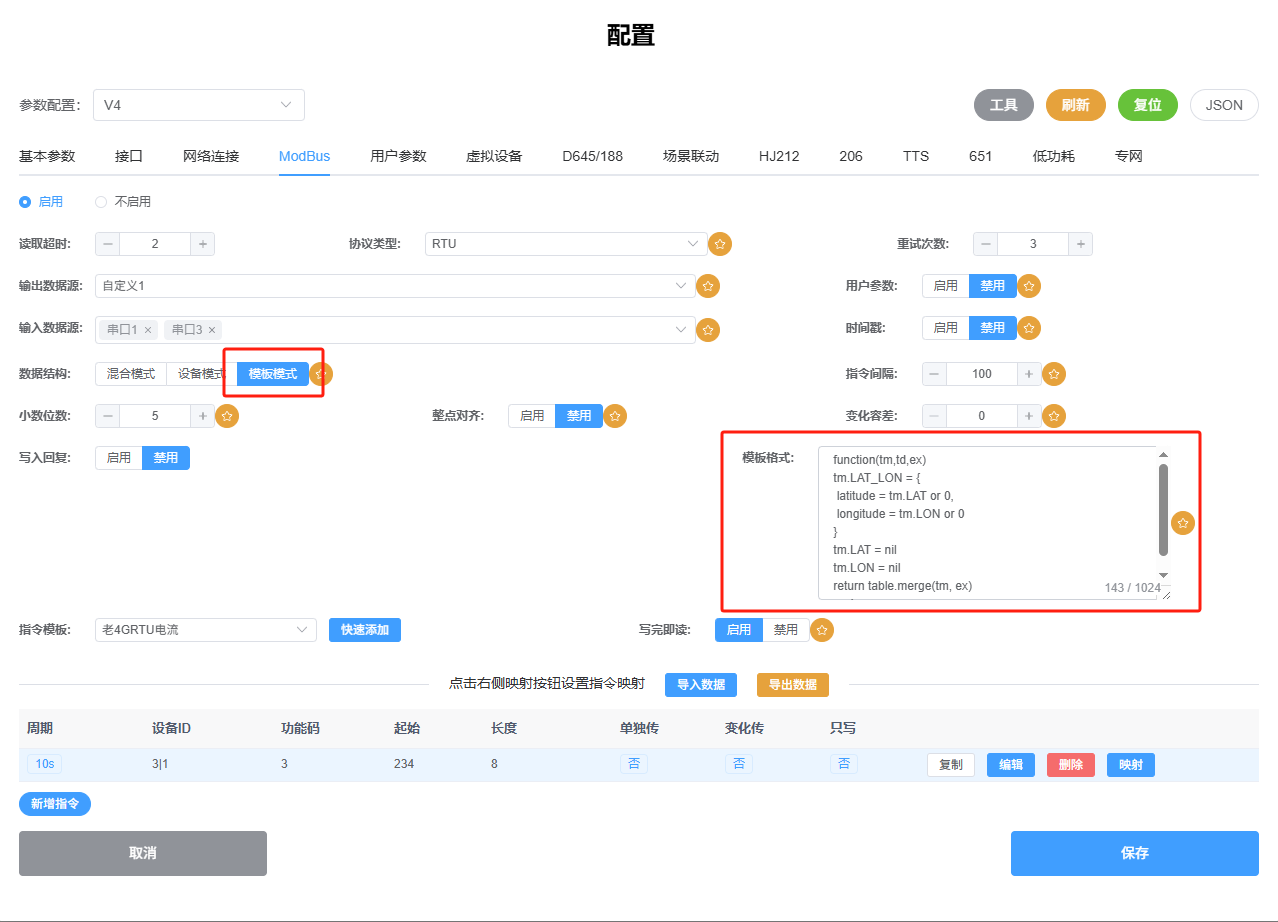
模板格式如下(复制请自行删除注释)
-- tm=混合结构table即指令映射的键值对,td=设备模式table,ex=用户参数
function(tm, td, ex)
-- LAT_LON即上一步position类型物模型的标识,由于position是结构体,所以这里用table模拟一个map!
tm.LAT_LON = {
-- 将指令映射中LAT和LON的值赋给latitude和longitude
-- latitude和longitude为position类型的两个固定参数,不能修改!
latitude = tm.LAT or 0,
longitude = tm.LON or 0
}
return table.merge(tm, ex)
end
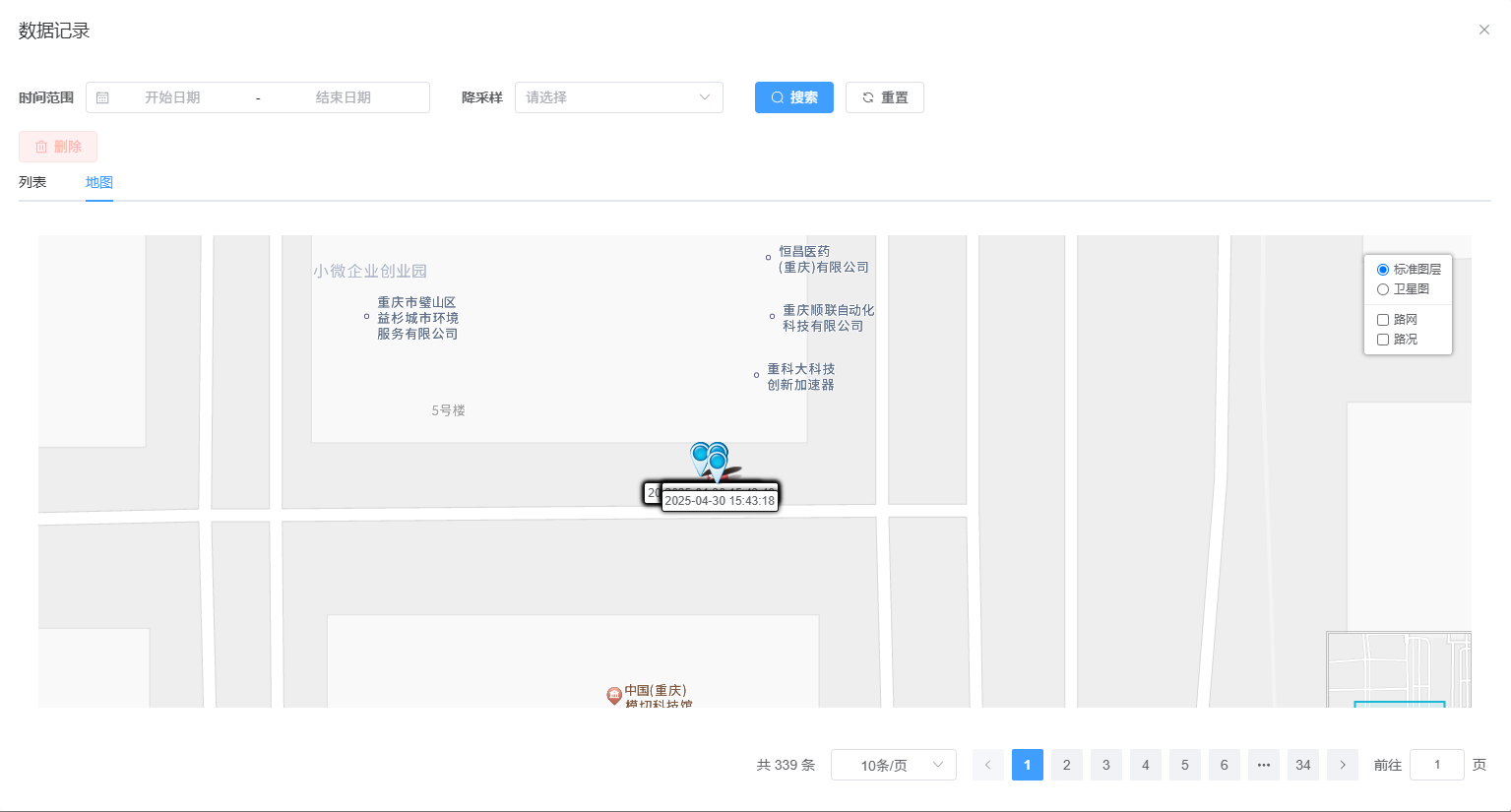
最后在设备运行状态中,即可查看坐标当前位置以及坐标轨迹